研究活動
「医療・福祉」における能力拡張システム
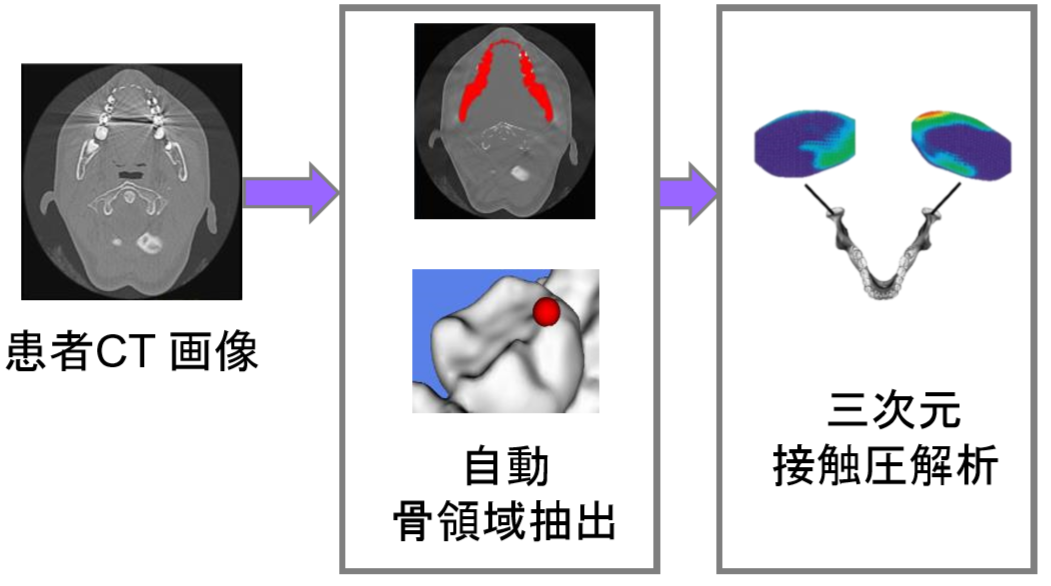
歯科口腔外科手術における術前計画支援システムの開発
歯科口腔外科における顎変形症に対する矯正治療において、手術計画を行うためにCT画像から下顎骨を抽出し、抽出データを基に手術計画を行っています。 しかし、下顎骨の抽出作業は対話的操作が必要であり、専門医に大きな負担となっています。そこで、CT画像から下顎骨を自動で抽出し、三次元顎関節接触圧解析を行う術前計画支援システムを開発しています。
力覚提示技術を用いた手術シミュレータの開発
手術者が高度な手術技能を安全に獲得できるよう、Virtual Reality技術を活用した手術訓練シミュレータの開発を行っています。 操作者へ視覚情報を与えるとともに、操作機器からの力覚情報を組み合わせることで、高い臨場感の手術環境を作り出すことができます。
手術の中には、臓器や脳を対象に微細で精密な操作のほかに、骨や歯などを対象に大きな操作力を与える施術があります。 口腔外科手術や整形外科手術で施される骨ノミや骨マレットを用いた切削・切除術では、骨折や穿孔を生じさせず、患部近傍の神経や血管を傷つけない熟練技能が求められます。 しかし、この手術シミュレーションを実現するためには、打撃操作に対して十分な剛性を持ち、大きな反力提示と衝撃に即応する高い応答性が操作機器に求められます。
そこで、骨マレットの打撃操作に耐える十分な剛性を持つ操作機器を開発し、制御手法の面から応答性を改善することで、高剛性化に伴う質量の増加した可動部においても高い応答性を発揮することができます。 打撃操作に拮抗可能な最大100Nの反力提示と0.76m/sの高速移動が可能です。 また、ハプティックジョイステックにより得られた知見を生かして、切削術における力覚提示手法の開発を行っています。