各研究テーマのボックス内をクリックすると詳細内容が表示されます。
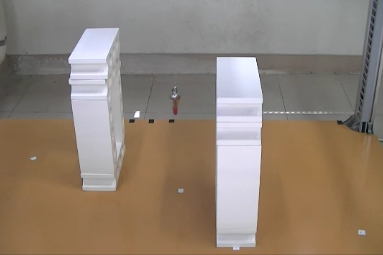
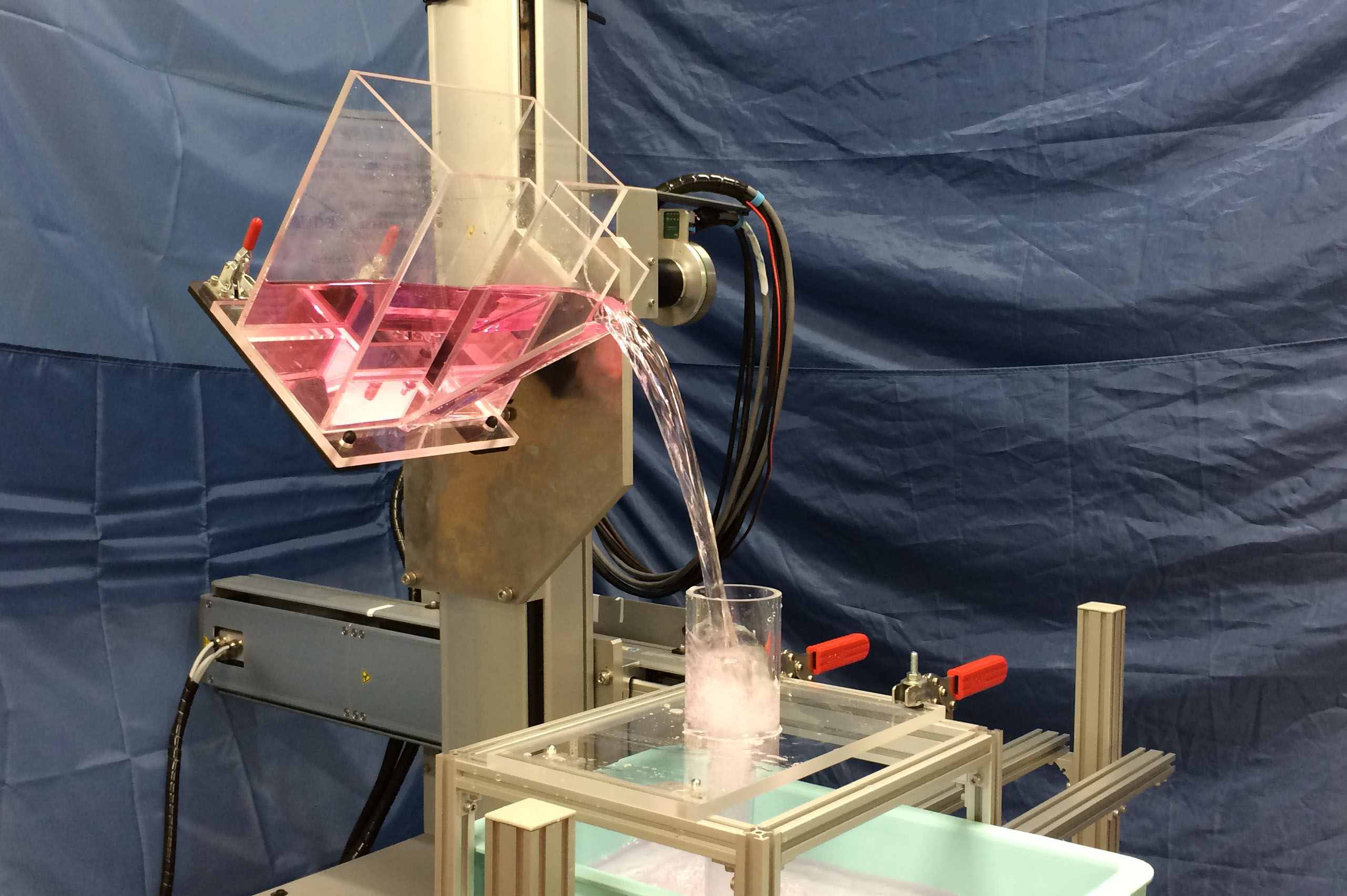
鋳造業における高温の溶融金属を鋳型内へ注ぐ自動注湯機の研究開発に取り組んでいます。注湯流量制御、流出液体の落下位置制御、直感的な操作が可能な遠隔操作型自動注湯機の開発を行っています。
工場などで設置されている天井クレーンを対象に、利用者が望む位置へ素早く正確に荷物を搬送する自動走行制御システムの研究開発に取り組んでいます。障害物を回避しながら、荷振れを抑えて目的地まで素早く搬送する制御システムの開発を行っています。
また、自動走行制御のみならず、クレーン操作時に生じる荷振れを抑制する振動抑制制御システムの研究開発にも取り組んでいます。
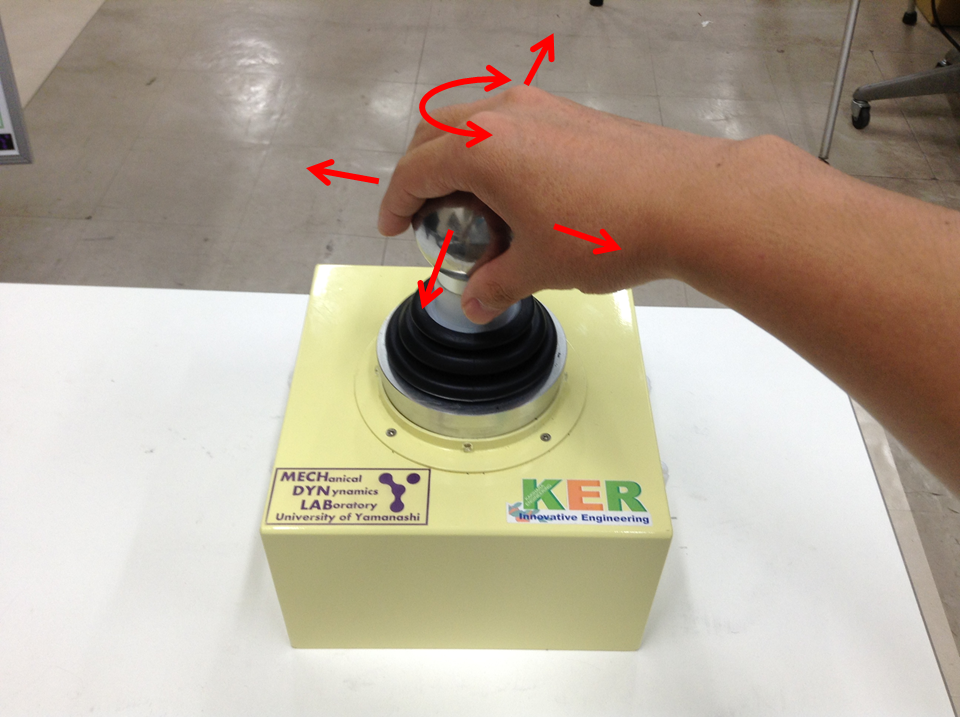
前後、左右、回転操作が可能な3自由度ジョイスティックにサーボモータを内蔵し、各方向の操作に対して反力提示が可能な3自由度力覚提示ジョイスティックの研究開発に取り組んでいます。このジョイスティックをクレーンなどの搬送機械に適用し、搬送物と障害物との距離に応じて反力提示を行うことで障害物への衝突を回避することができます。また、良好な操作性も実現します。
農地や建設現場などの傾斜地や不整地が多く存在する環境において、安全かつ効率的な運搬作業を支援する運搬ビークルの開発に取り組んでいます。 傾斜地での荷台水平化とパワーアシスト操作で傾斜地や不整地での自在な重量物運搬を実現します。
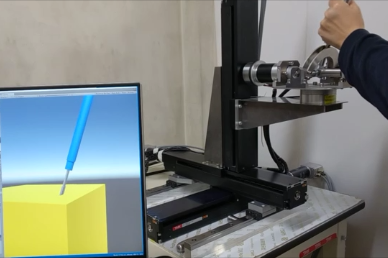
骨や歯などの硬組織に対する骨ノミを用いた切削術をバーチャルリアリティ技術を用いて臨場感のあるトレーニングができる手術シミュレータの研究開発に取り組んでいます。 衝撃に耐えうる高剛性な装置と応答性の高い制御システムをシステムインテグレーションすることで、臨場感のあるノミ切削トレーニングを可能にしています。
上肢リハビリテーションの一つであるワイピング訓練(テーブルの上での雑巾がけ訓練)に対して、力覚提示技術を用いて訓練負荷を調整できるリハビリテーション支援システムの開発に取り組んでいます。 ワイピング訓練に対して、臨場感と利用者の状態に応じた適切な訓練負荷を提供でき、訓練状況を可視化できるリハビリテーション支援システムを実現しています。
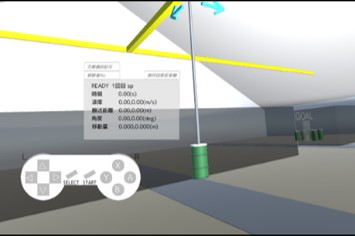
クレーンなどの機械操作では熟練操作技能が求められます。しかし、未習熟者が操作技能を習得するには安全な操作環境と訓練時間が必要になりますが、そのような場所と時間の確保は困難であり、熟練技能の習得が困難になっています。 そこで、バーチャルリアリティ技術を用いて、安全かつ効率的に機械の操作技能を習得できるトレーニングシステムの開発に取り組んでいます。
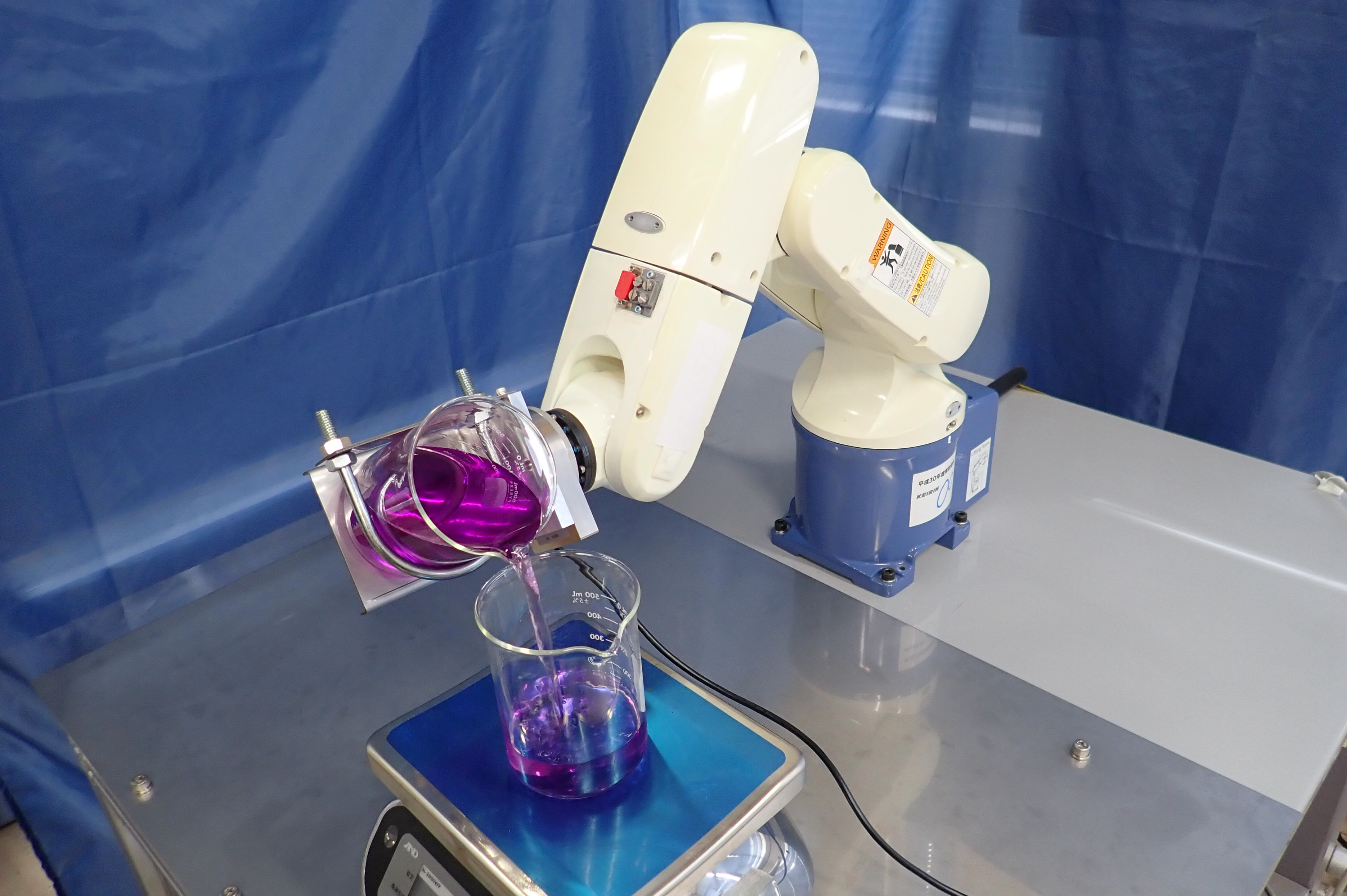
垂直多関節ロボットは多能であることで、その有用性を示すことができます。人間と同様の技能を実現することを目的に垂直多関節ロボットの制御システム開発に取り組んでいます。
12度の傾斜地でも荷台を水平化し、不整地でも最大積載重量80kgを自在に操作できる運搬ビークルの開発に取り組んでいます。高齢者や女性でも安全に重量物を運ぶことができ、桃やぶどうなどの付加価値の高い収穫物を優しく運ぶ技術を実現しています。
↑